Abstract
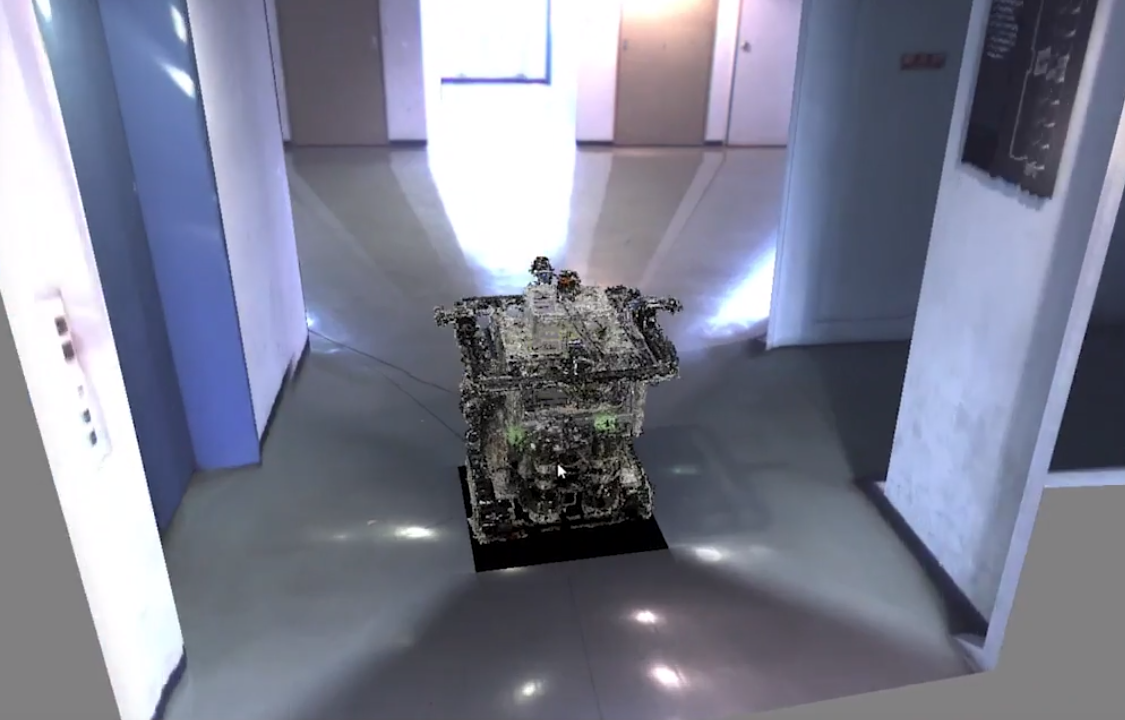
In robot teleoperation, a lack of depth information often results in collision of the robot with obstacles in its path or surroundings. To address this issue, free viewpoint images can greatly benefit the operators in terms of collision avoidance as the operators are able to view the robot’s surrounding from the images at arbitrary points, giving them a better depth information. In this project, we installed multiple fisheye cameras and an LRF on a robot, and free viewpoint images are generated under the assumption that walls are perpendicular to the floor. Experimental results show that the proposed method can generate free viewpoint images using cameras and an LRF. Finally, the proposed method is primarily implemented using OpenGL Shading Language to utilize a graphics processing unit computation to achieve a real-time processing of the multiple high-resolution images.